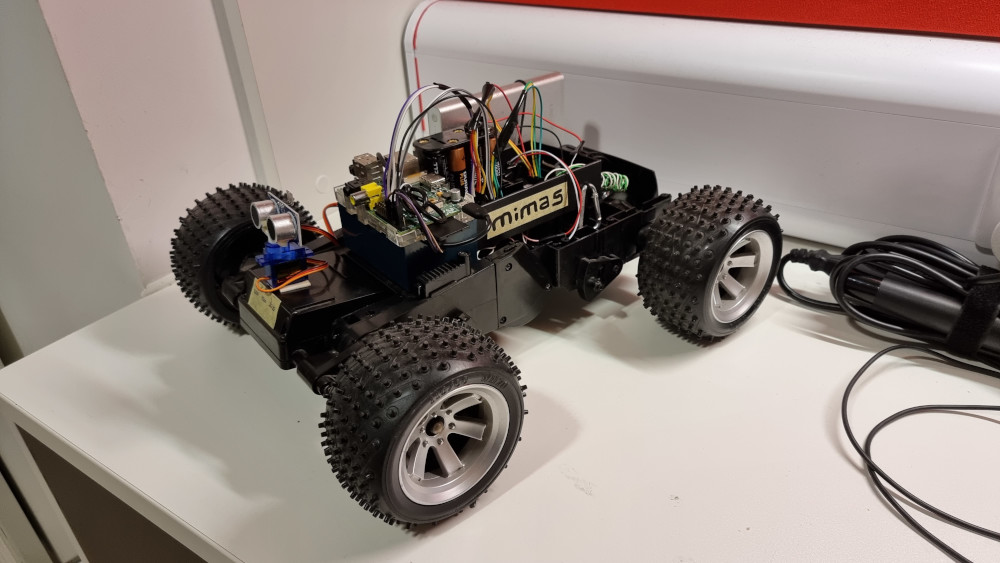
The RC-VSTB is ready for its final test: during the five hours of testing, the team stressed the RC-VSTB with a series of obstacle displacements and dimensions, taking notes of all errors for future improvements. This final test was successfully completed. Even if the work on the RC-VSTB could continue further, adding features and improving the autonomous driving algorithm, the team decided to start focussing on designing the actual Mimas Rover.
- [Hours of work: 5h]
- [People involved: Giorgio, Akshit]