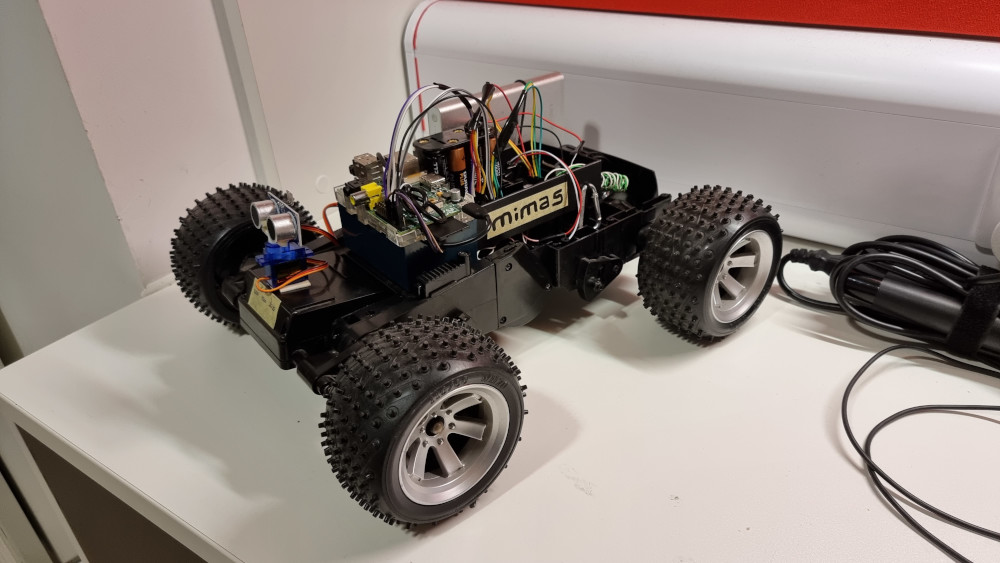
Alongside the designing process of the Mimas Rover, computer vision experiments were carried out. A focus was made on coding an algorithm to calculate the distance of the camera from a given target, using monocular vision in OpenCV. The distance is estimated by calculating the dimension of the target and its position with respect to the centre of the frame. This algorithm will require several improvements before being actually useful for driving the Mimas Rover autonomously.
- [Hours of work: 10h]
- [People involved: Giorgio]