Thank you!
Designing, building and testing Continuity requires a lot of effort and I invite you to be a part of it! Your support can fuels the Research, allowing me to test new technologies and materials, enabling exploration of new horizons. Every donation, no matter the size, is really appreciated. By contributing, you're not just funding Research; you're becoming a cherished member of a community, making this project come true.
ALL FUNDS raised are used for this Research. I really appreciate any help you can provide 🙏🏻 . https://gofund.me/55b980c0
Quick facts!
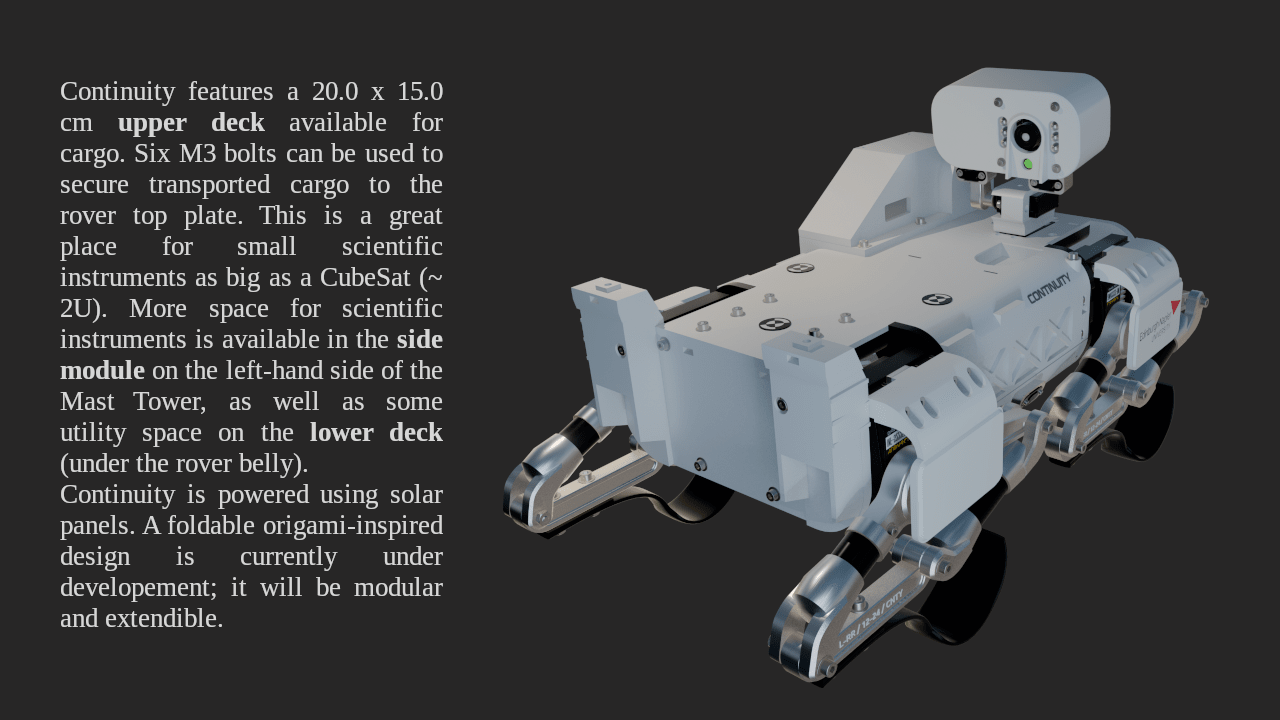
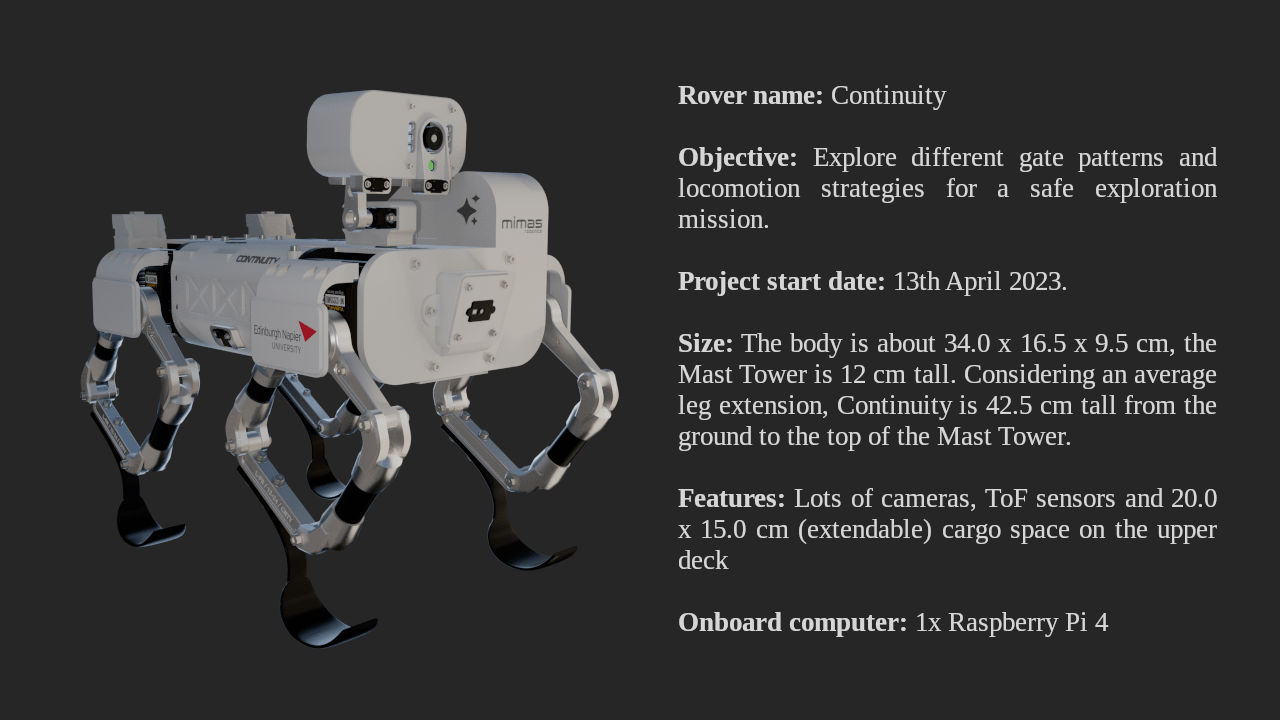 Continuity is designed to be as compact as possible, taking inspiration from already-existing quadruped robots, and integrating specific features of planetary rovers.
Using a small and relatively cheap robot for planetary exploration would guarantee access to inaccessible areas, like rocky slopes, craters and caves. Ideally, if a group of "Continuity" rovers cooperate in a multi-robot mission, it would be possible to sacrifice one of them for a hazardous mission, while keeping the others safe.
Continuity is designed to be as compact as possible, taking inspiration from already-existing quadruped robots, and integrating specific features of planetary rovers.
Using a small and relatively cheap robot for planetary exploration would guarantee access to inaccessible areas, like rocky slopes, craters and caves. Ideally, if a group of "Continuity" rovers cooperate in a multi-robot mission, it would be possible to sacrifice one of them for a hazardous mission, while keeping the others safe.